
Niemcy, Neumünster
1930
200-499
Dostawa: Cały świat
...mała główka stożkowa, zakres mocowania: 0,5 - 3,0 mm
25 x Nita ślepa UNIVERSAL STAL M5, mała główka stożkowa, zakres mocowania: 0,5 - 3,0 mm
50 x Nita ślepa UNIVERSAL STAL M6, mała główka stożkowa, zakres mocowania: 0,5 - 3,0 mm
25 x Śruba ślepa RIFBOLT® STAL M4, główka płaska, zakres mocowania: 0,3 - 2,0 mm
25 x Śruba ślepa RIFBOLT® STAL M5, główka płaska, zakres mocowania: 0,5 - 2,0 mm
Waga: 0,9 kg
Wymiary: ok. 255 x 80 mm
Zakres obróbczy nitów ślepych: (M3) M4+M5, M6 Aluminium + Stal
Zakres obróbczy śrub ślepych: M4+M5 Stal...






Niemcy, Neu-Ulm
1921
200-499
Dostawa: Cały świat
Grupa firmowa Welte jest wiodącym przedsiębiorstwem w segmentach wałów napędowych, technologii gięcia rur i hydrauliki, z wieloma lokalizacjami w Niemczech i Europie.
Dyrektorzy: Alfred Welte Dipl.-Ing. oraz Egon Welte jun. Dipl.-Ing.
Rok założenia: 1921
Liczba pracowników: ok. 400
15 lokalizacji w 6 krajach
Na pierwszym miejscu stoi nasze motto "Zawsze jest jakieś rozwiązanie".
Nasze obszary p...
Pasujące produkty

Wały napędowe





Niemcy, Tuttlingen
1948
200-499
Dostawa: Cały świat
... do wysokich prędkości. Dostępne są trzy różne warianty, które różnią się w zależności od zamierzonych branż i zastosowań. Głowica drukująca "RAPID Wire" spełnia wysokie standardy przemysłu kablowego. Dzięki innowacyjnej konstrukcji głowicy drukującej, kable i druty, a także inne długie, wąskie produkty mogą być optymalnie pozycjonowane i oznaczane. Efektem jest jeszcze szybsze i dokładniejsze drukowanie kabli. Dodatkowo, dostępne są głowice drukujące "RAPID Universal" i "RAPID Highspeed" do zastosowań w innych branżach.
Pasujące produkty

LEIBINGER JET3up RAPID - Przemysłowa drukarka atramentowa





Niemcy, Augsburg
1966
200-499
...). Oferujemy kompleksowe rozwiązania MRK, idealnie dopasowane zarówno dla małych i średnich przedsiębiorstw, jak i międzynarodowych korporacji - od inżynierii, przez uruchomienie, szkolenie, aż po pojedyncze komponenty, takie jak COBOTy, roboty oraz wyposażenie COBOT, np. chwytaki MRK, czujniki i pakiety węży. Jesteśmy również partnerem handlowym i certyfikowanym integratorem systemów Universal Robots. HLS COBOT WORLD nie tylko sprzedaje roboty UR, ale także dostarcza najlepsze możliwe rozwiązania. Wspólnie z Państwem badamy i analizujemy możliwości oraz korzyści płynące z kooperacji człowiek-robot.

Popularne kraje dla tego hasła wyszukiwania
'%3e%3crect%20width='533'%20height='1222'%20transform='translate(-190%20533.015)%20rotate(-90)'%20fill='%23005038'/%3e%3cpath%20opacity='0.5'%20d='M-188.473%20115.614C-112.211%2088.0158%2038.3422%2079.0809%20149.473%20189.232C239.492%20278.456%20248.652%20349.321%20210.698%20425.33C166.794%20513.26%20245.339%20673.443%20504.997%20535.212C753.274%20403.039%20959.781%20419.698%201032%20444.549'%20stroke='%23648E15'%20stroke-width='2.73803'/%3e%3cpath%20opacity='0.3'%20d='M99.5799%20536.403C60.7784%20573.721%20-2.13318%20573.721%20-40.9347%20536.403C-79.7379%20499.085%20-79.7379%20438.58%20-40.9347%20401.262C-2.13318%20363.943%2060.7784%20363.943%2099.5799%20401.262'%20stroke='%23648E15'%20stroke-width='126'/%3e%3cg%20opacity='0.5'%3e%3cpath%20d='M327.525%2071.6638L327.525%2091.4636'%20stroke='%23648E15'%20stroke-width='2.73803'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20d='M317.216%2081.5645L337.814%2081.5645'%20stroke='%23648E15'%20stroke-width='2.73803'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_5773_12938'%3e%3crect%20width='533'%20height='1222'%20fill='white'%20transform='translate(-190%20533.015)%20rotate(-90)'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e)
'%3e%3crect%20width='631.8'%20height='1440'%20transform='translate(0%20492.151)%20rotate(-90)'%20fill='%23005038'/%3e%3cpath%20opacity='0.5'%20d='M1.79999%20-2.62141C91.667%20-35.3357%20269.078%20-45.9269%20400.034%2084.6419C506.112%20190.405%20516.905%20274.406%20472.182%20364.505C420.444%20468.734%20513.002%20658.61%20818.981%20494.755C1111.55%20338.082%201354.9%20357.829%201440%20387.286'%20stroke='%23648E15'%20stroke-width='2.73803'/%3e%3cpath%20opacity='0.3'%20d='M341.24%20496.167C295.516%20540.402%20221.381%20540.402%20175.658%20496.167C129.932%20451.932%20129.932%20380.211%20175.658%20335.976C221.381%20291.739%20295.516%20291.739%20341.24%20335.976'%20stroke='%23648E15'%20stroke-width='126'/%3e%3cpath%20opacity='0.3'%20fill-rule='evenodd'%20clip-rule='evenodd'%20d='M1127.93%2040.9066L1075.14%2040.9066L1049.78%20-2.03165L1075.66%20-45.8521L1127.41%20-45.8521L1153.29%20-2.03165L1127.93%2040.9066ZM1260.73%20-51.9094L1153.36%20-156.011C1124.72%20-183.784%201078.28%20-183.784%201049.64%20-156.011L942.271%20-51.9094C913.628%20-24.1369%20913.628%2020.89%20942.271%2048.6624L1049.64%20152.767C1078.28%20180.54%201124.72%20180.54%201153.36%20152.767L1260.73%2048.6624C1289.37%2020.89%201289.37%20-24.1369%201260.73%20-51.9094Z'%20fill='%23648E15'/%3e%3cpath%20opacity='0.5'%20d='M147.091%2052.3593L136.548%2052.3593C134.671%2052.3593%20133.149%2053.8348%20133.149%2055.6549L133.149%2065.8777C133.149%2067.6978%20134.671%2069.1732%20136.548%2069.1732L147.091%2069.1732C148.969%2069.1732%20150.49%2067.6978%20150.49%2065.8777L150.49%2055.6549C150.49%2053.8348%20148.969%2052.3593%20147.091%2052.3593Z'%20fill='%23648E15'/%3e%3cpath%20d='M1038.52%20101.031C1045.58%20101.031%201051.3%2095.4844%201051.3%2088.642C1051.3%2081.7996%201045.58%2076.2528%201038.52%2076.2528C1031.47%2076.2528%201025.75%2081.7996%201025.75%2088.642C1025.75%2095.4844%201031.47%20101.031%201038.52%20101.031Z'%20stroke='%23005038'%20stroke-width='2.73803'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_5518_1915'%3e%3crect%20width='631.8'%20height='1440'%20fill='white'%20transform='translate(0%20492.151)%20rotate(-90)'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e)
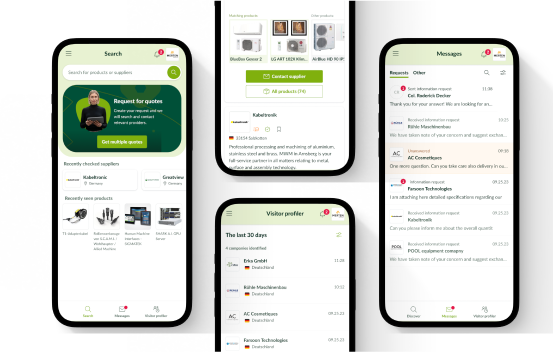
Aplikacja europages jest tutaj!
Skorzystaj z naszego ulepszonego wyszukiwania dostawców lub twórz zapytania w drodze za pomocą nowej aplikacji europages dla kupujących.
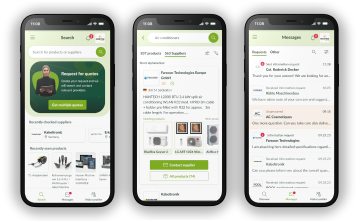
Pobierz ze sklepu App Store
